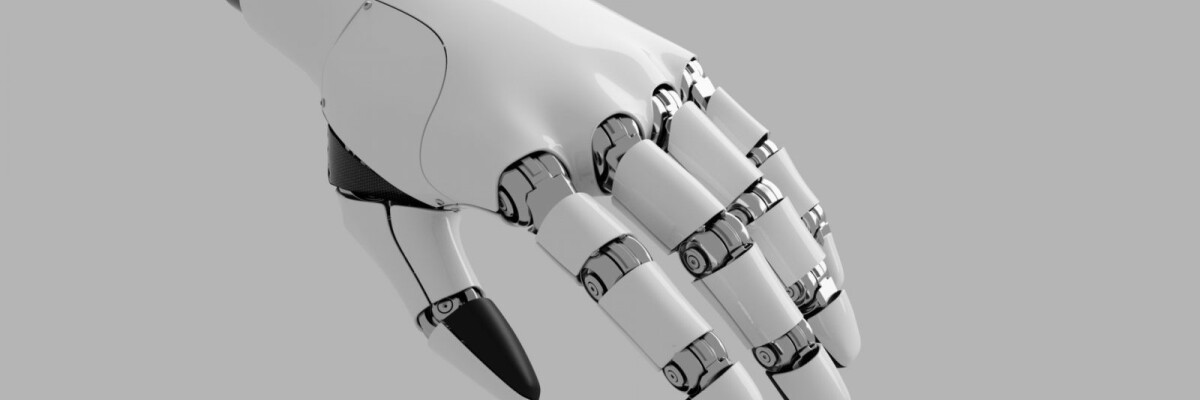
The BionicSoftHand prosthesis developed by Festo, a German manufacturer, looks exactly like a real hand. The invention not only feels like a real hand, but it also simulates the mechanisms of its interaction with the human brain.\n
It is widely known that before taking an object into our hands, our brain calculates the efforts required, the necessary finger position, and how open our palm needs to be. We start developing this function from an early age. The new prosthesis developed by Festo follows a similar principle.
The device is built from soft and flexible materials, making the prosthesis as similar to a real hand as possible. This approach can significantly reduce the amount of injuries resulting from incorrect use of the prosthesis, and make the process of using it extremely intuitive, simple and pleasant.
BionicSoftHand does not use a skeletal structure, using instead a system of inflatable bellows covered in 3D printed elastic material that bends along with the user’s movements. This completely replicates the way human muscles and tendons work.
The prosthetic fingers contain motion and force sensors that are also built from soft materials and easy to bend. These built-in sensors transmit incoming information and create a high-quality feedback loop that completely imitates the sense of touch.
The device is not programmed for any specific motions, but it is capable of quickly calculating the optimal method of interacting with them. This is similar to the way a child learns to hold a fork, or some other object, except it only takes a fraction of a second. With time, the hand becomes more sophisticated, using the combinations of movements it learned before to solve new problems.
Share this with your friends!



Be the first to comment
Please log in to comment