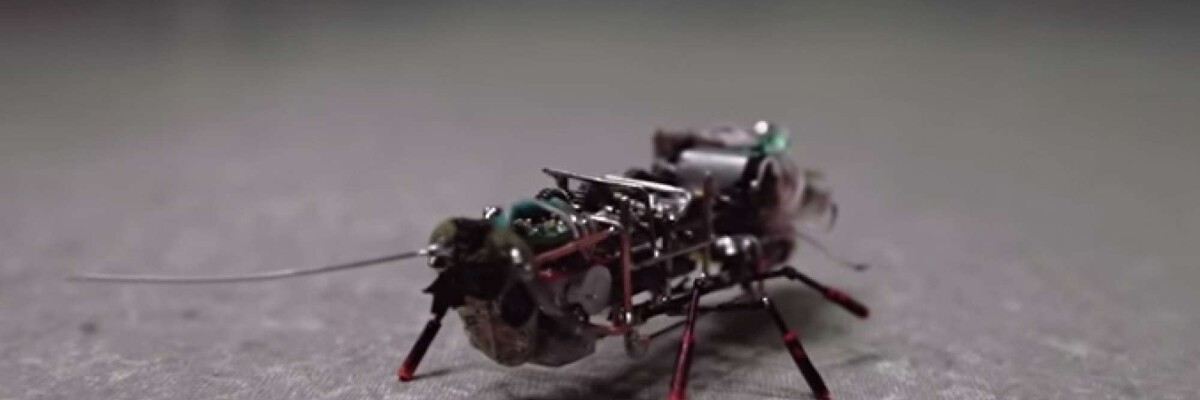
Ученые из Калифорнийского университета в Беркли более 10 лет трудятся над роботами-тараканами VelociRoACH, пытаясь сделать их как можно больше похожими на настоящих насекомых. Недавно был устранен главный недостаток устройств.
Дело в том, что, как и настоящие тараканы, роботы VelociRoACH иногда падают на спину, не имея возможности подняться. Этот недостаток требовал доработки, и изначально инженеры планировали добавить роботу хвост, который бы помогал подняться, но позже от этой идеи отказались, так как настоящие тараканы никаких хвостов не имеют. В итоге было принято решение изменить программное обеспечение VelociRoACH, научив роботов помогать друг другу.
Кроме того, была изменена конструкция их панцирей. Новые устройства имеют поликарбонатное покрытие изогнутой формы, напоминающее строение настоящих тараканов. По бокам панциря находятся резиновые ленты, помогающие VelociRoACH перевернуть упавшего на спину сородича. Посмотреть, как это происходит, можно в видео ниже.
Поделитесь этим с друзьями!




Будьте первым, кто оставит комментарий
Пожалуйста, авторизируйтесь для возможности комментировать