Благодаря новой упругой конструкции, роботы лучше выдерживают столкновения с твердыми предметами.
В Гарварде разработали пчеловидного робота, который машет крыльями, благодаря мягким искусственным мышцам. Конструкция позволяет роботу не разбиваться при ударах о твердые поверхности.
Мягкие электрические приводы сделаны их диэлектрических эластомеров, которые обладают хорошей электроизоляцией и достаточно эластичны. Принцип их работы основан на способности деформироваться под воздействием электрического поля.
Проводимость электродов достаточно высокая и инженеры управляют ими с помощью электрических импульсов.
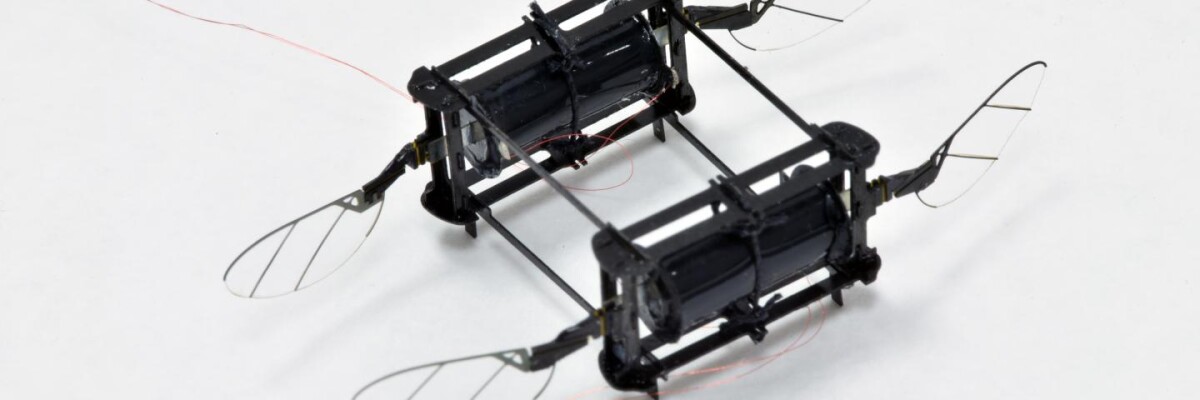
Для тестов были разработаны летающие модели RoboBee, которые имеют два крыла и способны взлетать с горизонтальной поверхности. Однако управление двукрылыми роботами оказалось слишком сложным и разработчики создали четырехкрылый вариант, который способен совершать управляемый полет. Даже после ударов о различные предметы роботизированные пчелы смогли долететь до указанного места и приземлиться.
Новый вид небольших летающих роботов может оказаться полезным для обследования местности при поисково-спасательных операциях.
Поделитесь этим с друзьями!




Будьте первым, кто оставит комментарий
Пожалуйста, авторизируйтесь для возможности комментировать