По мере совершенствования и развития новейших технологий все больше экспериментов и различных других исследований проводится роботами.
Например, такие автоматизированные устройства активно используются в космонавтике — для помощи или даже замены астронавтов при выполнении каких-либо сложных для человека задач. Роботы могут исследовать местность другой планеты в самых опасных условиях, они способны выдерживать космическое излучение, самые суровые климатические особенности и воздействие экстремально низких или же высоких температур. Также умные машины могут выполнять ремонтные работы на кораблях, снимать качественные видео и фотографии из космоса. Сегодня мы поговорим о том, какие роботы используются для исследования космоса и как они устроены.
Первые космические роботы

По данным NASA, одним из первых роботов, успешно отправленных в космос и предназначенных специально для работы на поверхности небесного тела, был советский «Луноход-1». Его запустили для исследования Луны и ее космического излучения еще в 1970 году. Первый робот-космонавт представлял собой огромную конструкцию, изготовленную из магниевых сплавов, на металлических колесах. Такой планетоход мог передвигаться со скоростью до 2 километров в час, разворачиваться на месте, подниматься и спускаться по склонам, преодолевая выступы и различные трещины на поверхности Луны. Масса «Лунохода-1» составляла более 700 килограммов.
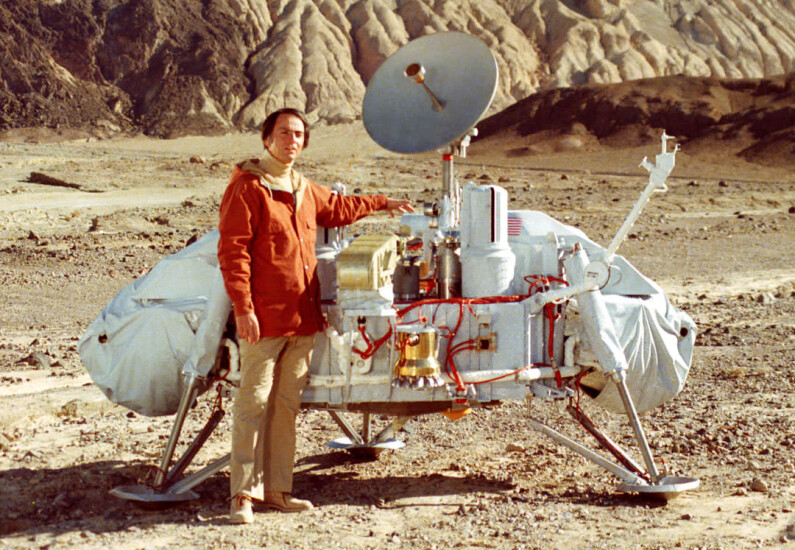
Позднее, в конце 1970-х, в Америке запустили проект NASA под названием «Викинг». Для этого были построены два одинаковых беспилотных корабля с автоматическими элементами — «Викинг-1» и «Викинг-2». Каждый из них был оснащен роботизированными технологиями и состоял из посадочного модуля и орбитального аппарата. Вместе они вышли на орбиту Марса, для чего потребовалось восемь ракетных двигателей, после чего разделились и самостоятельно спустились на поверхность планеты для исследования разных ее частей.
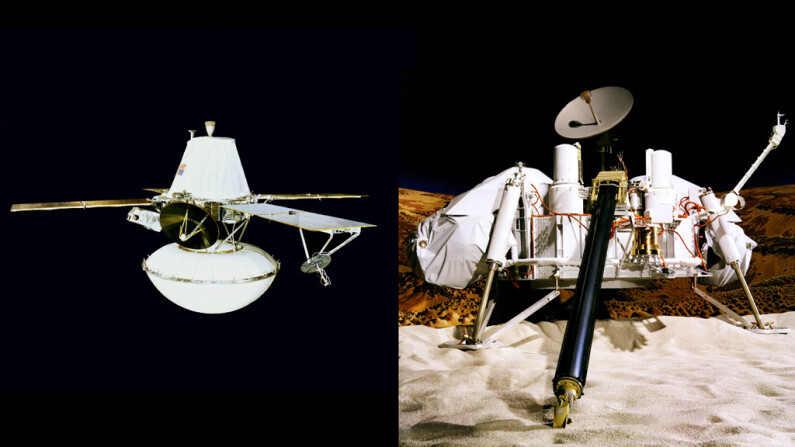
Интересно, что у этих роботов уже не было колес. Для мягкой посадки использовались специальные опоры со встроенными амортизаторами. Помимо фотографирования и сбора других научных данных на поверхности Марса, «Викинги» провели три биологических эксперимента, направленных на поиск возможных признаков жизни. Неожиданно они обнаружили химическую активность в марсианской почве, но не предоставили четких доказательств присутствия живых микроорганизмов.
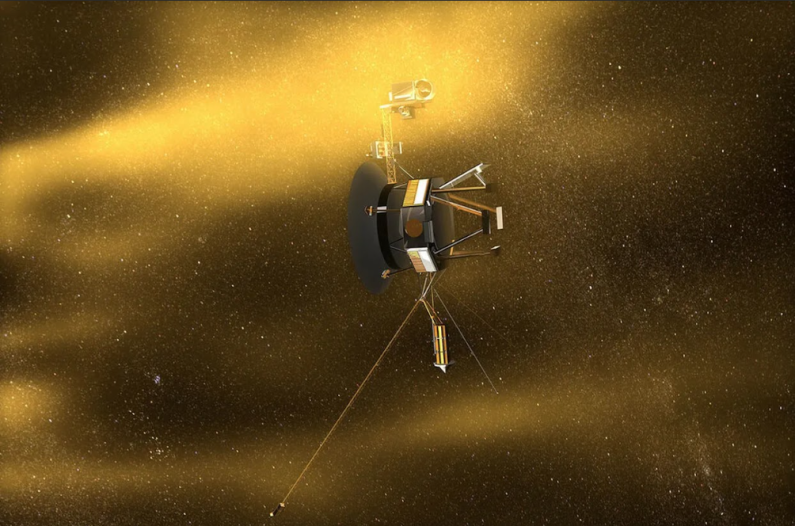
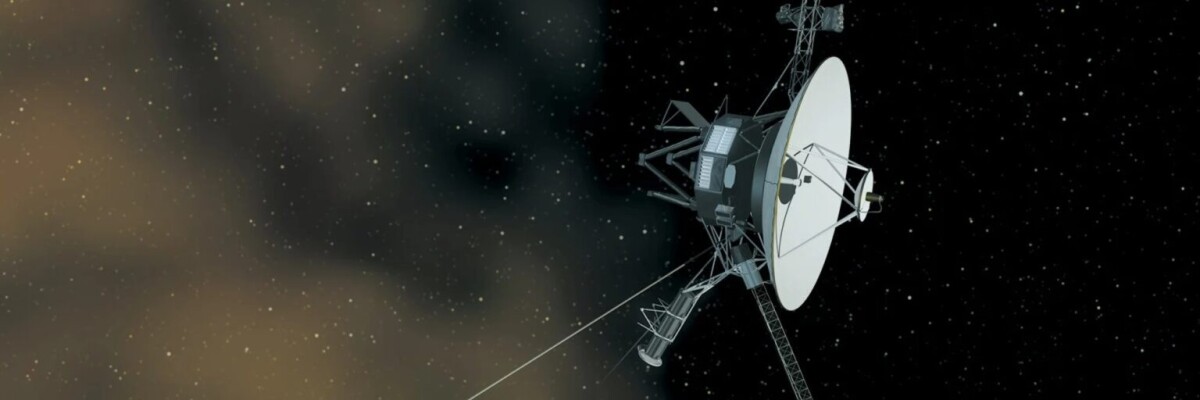
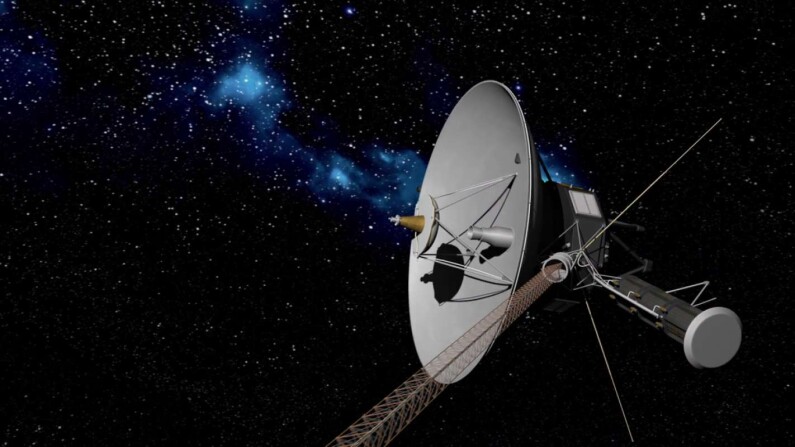
Примерно в это же время роботизированные космические корабли «Вояджер-1» и «Вояджер-2» были запущены для изучения внешней Солнечной системы. По данным NASA, роботов разработали преимущественно для проведения исследований вблизи Юпитера и Сатурна. Интересно, что они до сих продолжают свое путешествие, а прошло уже более сорока лет. После ряда открытий, например, действующих вулканов на спутнике Юпитера Ио и парадокса колец Сатурна, миссия была продлена. В настоящее время «Вояджеры» находятся ближе к Плутону, чем к Земле или Солнцу. Только в августе 2012 года «Вояджер-1» вышел в межзвездное пространство, а «Вояджер-2» догнал его только к 2018 году. Сейчас «Вояджер-2» продолжает исследовать Уран и Нептун и до сих пор остается единственным роботизированным кораблем, посетившим эти планеты.
Современные роботы-космонавты

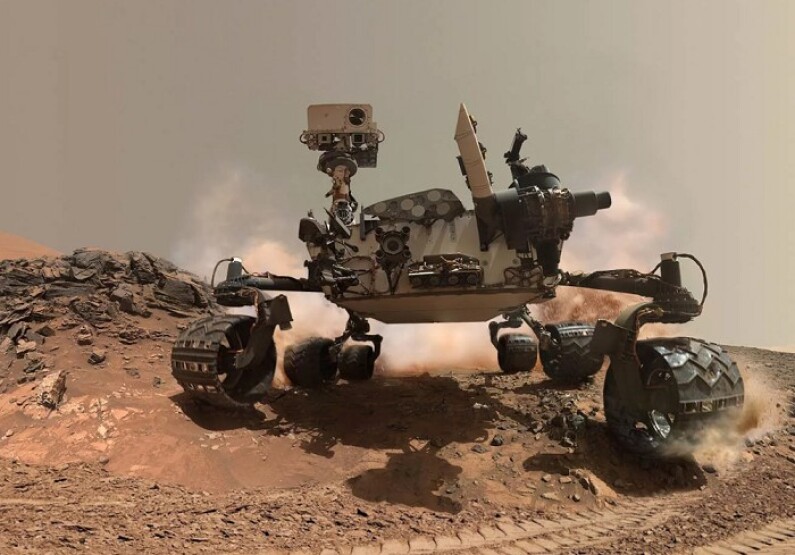
Помимо «Вояджеров», в настоящее время целые десятки роботов отправлены в космос для изучения других планет. Например, марсоход «Оппортьюнити», запущенный еще в 2004 году, работает до сих пор. Он перемещается по поверхности планеты, заезжая в кратеры и объезжая скалы, и делает множество снимков по запрограммированным характеристикам. Изначально деятельность «Оппортьюнити» была нераздельно связана с другим планетоходом — «Спирит». Он первым отправился на поверхность Марса для изучения его просторов. А «Оппортьюнити» стартовал на месяц позже, но проработать ему удалось гораздо дольше. «Спирит» продержался шесть лет и в 2010 году перестал выходить на связь. Однако всего через пару лет, к 2012 году, в рамках программы «Марсианская научная лаборатория» на планету прибыл новый марсоход «Кьюриосити», который снабжен целой химической лабораторией для анализа обнаруженных на планете элементов. За счет этого робот оказался гораздо больше и тяжелее своих предшественников. Если «Оппортьюнити» весит не более двухсот килограммов, то вес «Кьюриосити» доходит до отметки 899. Тем не менее оба устройства достаточно маневренные, способны быстро и ловко передвигаться, разворачиваться на месте и преодолевать препятствия. Планировалось, что шестиколесный аппарат «Кьюриосити» проведет всего один год в поисках признаков жизни на Марсе, но миссию продлили, и робот по сей день путешествует по Красной планете.
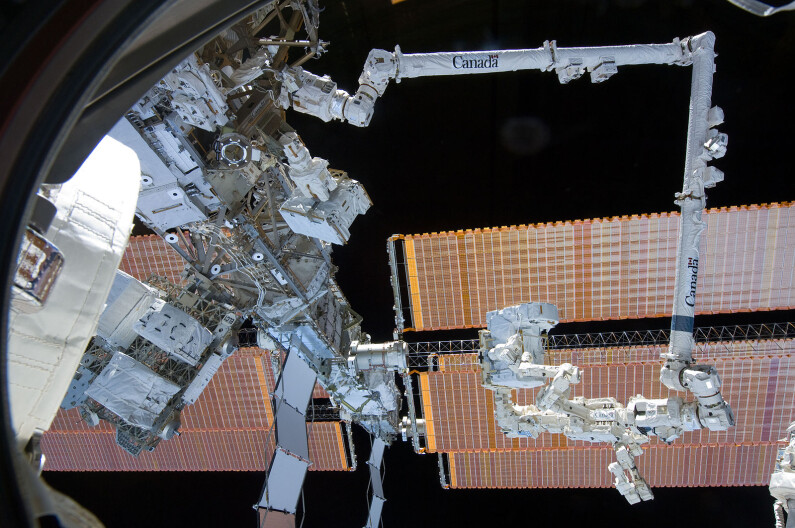
Кроме того, существуют не только роботы — исследователи других планет, но и автоматические устройства, предназначенные для ремонтных работ на космических кораблях. Например, Канадское космическое агентство разработало роботизированную руку Dextre для тестирования новых инструментов, а также для установки и замены космического оборудования, такого как внешние камеры, электрические системы и другие компоненты, оказавшиеся неисправными. CSA (Canadian Space Agency) утверждает, что Dextre — это универсальный робот, обслуживающий Международную космическую станцию, и вместе с тем самый сложный космический аппарат, созданный канадскими учеными для МКС. Dextre решает рутинные задачи, которыми раньше занимались астронавты в суровых условиях космоса. Так, робот-разнорабочий станции позволяет астронавтам проводить больше времени за научными экспериментами вместо рискованных выходов в открытый космос. Dextre имеет максимально гибкое тело, способное двигаться самыми разными способами. У него есть несколько рук, каждая из которых имеет семь суставов. Это обеспечивает достаточно большой диапазон движения, соответственно, Dextre может выполнять даже более сложные задачи, чем человеческая рука. Кроме того, робот обладает таким же осязанием, как у человека! А глаза его заменяют пять камер, при этом к 2024 году ученые планируют значительно усовершенствовать его органы чувств.
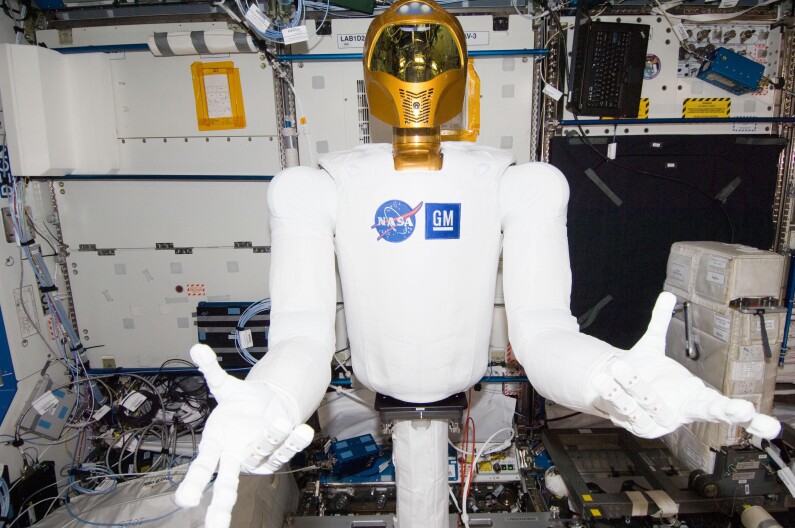
Таким образом, канадский робот напоминает человека по многим характеристикам и возможностям, однако внешне он остается такой же машиной. А вот NASA и General Motors разработали человекоподобный аппарат, который назвали «робонавтом». Он был задуман еще в 1990-е годы, однако впервые такой аппарат, названный R2, отправился на МКС в 2011 году. Тогда он представлял собой только человекоподобное туловище без ног, то есть нижняя часть тела отсутствовала. Голова его была выкрашена в золотой цвет, руки оснащены пальцами, а суставы напоминали человеческие. Устройство умеет писать и держать даже самые тяжелые предметы. В его шлем вмонтированы четыре видеокамеры, благодаря им робот не только ориентируется в пространстве, но и транслирует сигналы. В 2014 году для R2 разработали нижнюю половину тела — ноги. Тогда его общий рост составил 2,7 метра. Сейчас робонавта продолжают совершенствовать для того, чтобы в будущем отправить на поверхность Луны.
Другой гуманоидный робот назван «Валькирия». Он также разрабатывался NASA, инженеры уделили особое внимание удобству эксплуатации — легко снимаются и меняются батарея для автономной работы, а также его руки и другие основные узлы. Одет такой гуманоид в костюм из ткани с мягкой подкладкой. Это обеспечивает не только дополнительную защиту самого устройства, но и удобство и безопасность людей, которым, возможно, придется работать вместе с ним на космической станции. Ведь рост Валькирии составляет почти два метра, а вес — 140 килограммов. Главная цель разработчиков такого робота — колонизация Марса. Поэтому необходимо создать гуманоидов, способных обеспечить там пригодные условия для жизни людей. Так постепенно совершенствуется и Валькирия: сейчас она имеет встроенные сканеры и видеодатчики в голове, что позволяет ей самостоятельно передвигаться и прокладывать оптимальный маршрут. А механические руки-манипуляторы способны удерживать даже тяжелые предметы, что особенно важно в строительстве научно-исследовательской базы на Марсе.

Помимо уже названных космических аппаратов, существуют и такие, которые специализируются на исследовании океанов далеких планет. Одни из таких экспериментальных машин — RoboSalps, разработанные учеными из Бристольского университета. Они представляют собой совсем небольших роботов, названных в честь сальп — маленьких водных животных, которые формируют прочные цепочки. Так и эти умные машины соединяются друг с другом, образуя структуры из нескольких устройств, которые могут маневрировать как подводные лодки. Ученые утверждают, что если один из RoboSalps в группе выйдет из строя, другие смогут это компенсировать и создать систему резервирования. Кроме того, несколько роботов могут путешествовать к подводному месту назначения в группе, затем разделяться для выполнения задач по отдельности, а после этого вновь группироваться. Каждый такой RoboSalp имеет мягкий силиконовый корпус со специальными трубочками, а внутри находятся электродвигатель и пропеллер. Именно двунаправленный пропеллер позволяет роботу двигаться вверх и вниз или вперед и назад. Однако такой простой механизм допускает довольно ограниченный набор действий. Тем не менее ученые заявляют, что благодаря небольшому весу роботы отлично подходят, например, для исследовательской миссии в покрытом льдом океане на спутнике Юпитера Европе.
Несмотря на то, что разработка и создание роботов — одна из самых дорогостоящих и трудозатратных отраслей, это позволит сохранить безопасность многим астронавтам. Так, роботизированные космические системы успешно справляются со своими исследовательскими и чисто техническими задачами. В дальнейшем ученые рассматривают возможность освоения и колонизации других планет с помощью экспериментальной космической техники.
Поделитесь этим с друзьями!




Будьте первым, кто оставит комментарий
Пожалуйста, авторизируйтесь для возможности комментировать